Hi, I'm Denim Patel
Senior Machine Learning Engineer
Specializing in Computer Vision, Robotics, and AI
Building intelligent systems that see, learn, and adapt
I'm a Senior Machine Learning Engineer at SimpliSafe, specializing in Computer Vision, Robotics, and Autonomous Systems. My passion lies in developing intelligent systems that can perceive, understand, and interact with the world.
I hold a Master's degree from Worcester Polytechnic Institute (WPI), where I focused on Robotics and Computer Vision. With extensive experience in deep learning, visual odometry, object detection and tracking, I've worked on cutting-edge projects ranging from autonomous navigation to real-time perception systems. My expertise spans the full ML pipeline - from research and prototyping to production deployment.
Jun 2024 - Present · Boston, Massachusetts, United States
Skills: Computer Vision · Deep Learning · PyTorch · AWS
Dec 2020 - Jul 2024 · 3 yrs 8 mos · Pasadena, California, United States
Skills: Visual Odometry · SLAM · Data Analysis · Python · C++
Aug 2020 - Dec 2020 · 5 mos
Skills: 3D Object Detection · Point Cloud Processing · Deep Learning · PyTorch · Python
2018 - 2020
2013 - 2017
iRobot
ABU Robocon India
Theme: Asobi - The landing disc at Pune, India
ABU ROBOCON International
Theme: Robominton at Yogyakarta, Indonesia
ABU Robocon India
Theme: Robominton at Pune, India
ABU Robocon India
Theme: Salute to parenthood at Pune, India
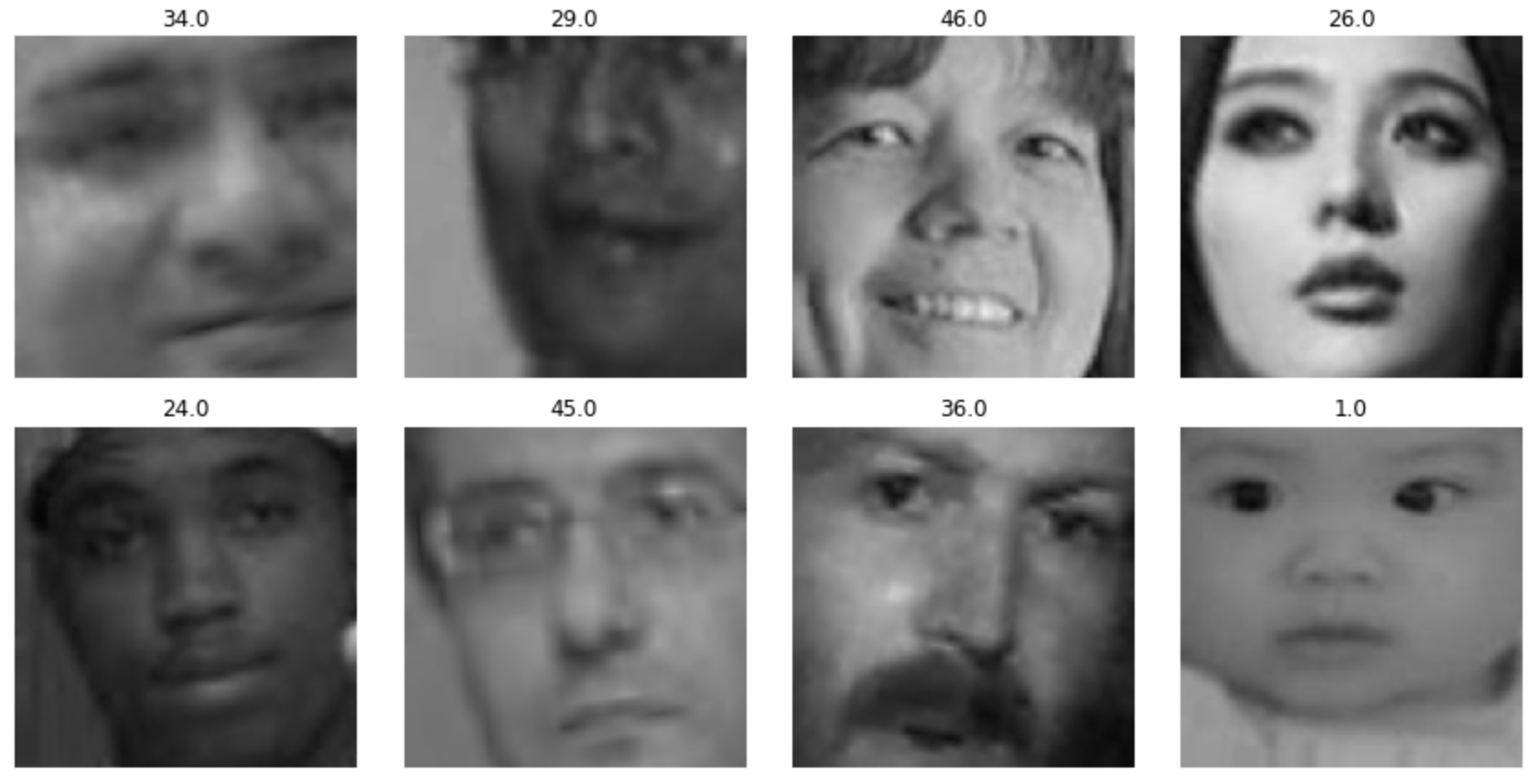
The aim of this project was to predict the age of a person from the image.
The aim of this project is to learn the visual Odometry pipeline. Current implementation includes feature detection, feature tracking and Pose estimation using only mono-camera.
The aim of the project was to detect and localization of Transparent Globe. For that we explred feature based techniques as well as SOTA DL based Faster R-CNN.
Object tracking method uses Kalman filter which has constant velocity motion model and shape detection based measurement model
The goal of this excercise was to know about the Gold-standard algorithms for camera calibration. To show the application of calibrated camera AR object is placed on a chessboard.
The goal of this mini-project is to implement Dijkstra, A* and A* variants from scratch. Any time variant ANA* refines the path quality in each iteration as shown in the gif.
We desingned and developed SCARA Robot for custom application. 3D printing, and frameworks such as merlin and repetier were explored and integrated.
The goal of this project was to learn how to use OpenCV ready algorithms such as Haar cascade for facial recognition
RRT and family is helpful in path planning in higher dimensions especially for redundunt manipulators and multi-DOF mechanisms. Implemented RRT and its variants such as RRT* and informed RRT*. RRT* refines the path quality in each iteration as shown in the gif.
The aim of this project was to optimize the pick and place operation of the robotic arm based on the physical features of the objects.
Developed Pan-tilt motion module, which was optimized for less inertial and rigidity and all motors are mounted on base!!